
ODIN Mobile Visual Servoing module
Main functionalities
ODIN Mobile Visual Servoing module is able to carry out manipulation tasks on non-stationary parts. This module adds the capability to carry out real-time control of the robot arms mounted on a modile platform based on visual feedback received by vision systems. This module enables robot to adapt the tool’s movements in real time. This feature is very useful for application where parts are continuously moving along the conveyor belt (or an AGV in similar scenarios).
Technical specifications
The current development has been integrated at TECNALIA’s pre industrial demonstrator and includes the following features:
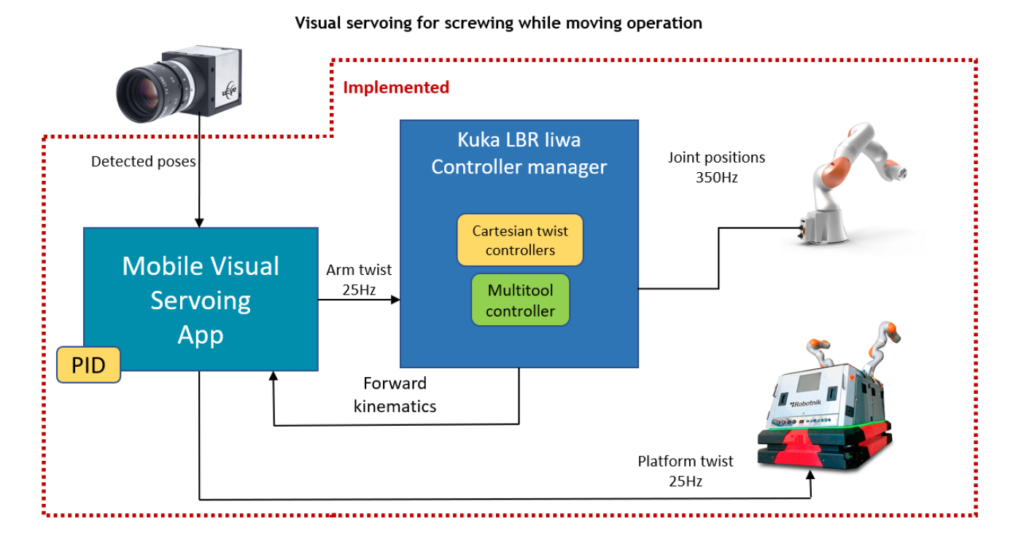
- Low-level robot control based on the Direct Servo and Smart Servo libraries provided by KUKA. The KUKA LBR IIWA arms are directly connected to ROS nodes which commands the manipulators in joint space with a frequency of up to 350Hz.
- Cartesian twist controller developed by TECNALIA and implemented as ROS controllers (plugin). This controller accepts twist commands which can be referenced to any arbitrary tool and reference frame.
- Control framework to enable/disable low-level control of both KUKA LBR IIWA arms. This framework allows to mix of high-level movements (joint trajectories) with control operations in any application in a seamless way.
- Mobile Visual Servoing application able to control both the mobile platform and robot arm based on the visual feedback, relying on an eye-to-hand configuration where the camera is placed on the front of the mobile platform. This module generates twist commands which are
sent to the Cartesian twist controller and the mobile platform with a frequency of 25Hz.
Regarding the Mobile Visual Servoing application, a state machine is added to guide the screwing task:
- Initial platform approach: The mobile platform approaches the desired marker pose to place the robot in a position where the arm can reach the screws. At this initial phase, the arm is still, only the platform receives twist commands.
- Initial arm approach: As the mobile platform is placed near the desired position, the arm tries to reach a pose perpendicular to the screw plane and at a parametrizable distance. The platform receives twist commands to adjust its position to the desired
marker position while the arm receives twist commands to the approach pose. - Destination arm approach: The robot arm tires to reach the screw position. At this phase, the platform receives twist commands to adjust its position to the desired marker position while the arm receives twist commands to the screwing pose.
- Gripper activation: As the gripper can take some time until its activation, the screwing task in this specific case, the mobile platform and arm must maintain the position while the target (engine) is moving. The gripper is activated asynchronously using a thread
to call a defined ROS service. In this case, both the mobile platform and its robotic arm receive twist commands to compensate the target’s movement. - Operation: In this state, the platform and the robotic arm maintain the desired position for a defined amount of time. This state is used to leave some security time to perform the task (screwing in this case) and carry out the task without any unexpected event. In
this case, both the mobile platform and arm receive twist commands to compensate the target’s movement. - Arm retract: In this last state the mobile platform maintains the defined marker position while the arm moves backwards to a safe position perpendicular to the screw, ensuring a safe removal of the screwdriver.
- After this last state, if more screws are defined, the state machine goes back to the initial arm approach state to work on the next screw.
