
Dynamic task planning & work re-organization
Name of demonstration
Dynamic task planning & work re-organization
Main objective
This demonstrator core objective is to support production designers during the manufacturing system design process and reduce the time and size of the design team needed for applying a change in the existing line.
Short description
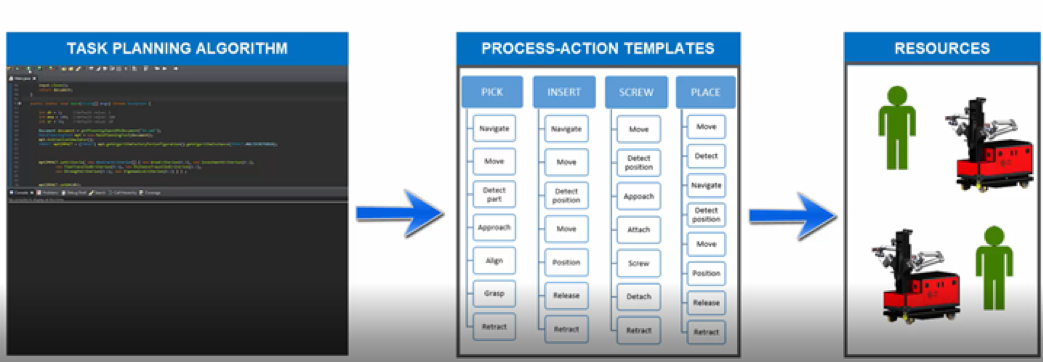
Task planner generates and evaluates alternatives for task allocation and rough motion planning of human and robot operations, using information and data extracted from simulations. The evaluation of the generated alternatives is based on multi-criteria decision-making modules, integrating 3D graphical representation, simulation, and embedded motion planning. Dynamic Task planning & work re-organization Use case can be applied in production lines that use either mobile or station robots.
Owner of the demonstrator
University of Patras
NACE
C29.3 - Manufacture of parts and accessories for motor vehicles
Keywords
Human Robot Collaboration , Layout design, Mobile robot, Task planning, Manufacturing.
Potential users
Manufacturing SMEs or bigger companies from multiple sectors that they aim to explore Human Robot collaborative work cells or need novel solutions for optimizing their production, while automating the design process
Benefits for the users
– Allocate tasks to resources with respect to ergonomic rules and in order to increase the quality of operator’s job.
– Maintain the cycle time as is defined by the End User.
– Achieve better utilization of resources.
– Increase systems reconfiguration as it reassigns tasks and resources in case of unexpected events
– Generalize unified model for active (humans and robots) and passive (working tables, fixtures etc. resources
– Generate HRC workplace layout can upon the criteria defined by the user and depending on the requirements and specifications.
– The criteria can be changed if new requirements and specification introduced because of a new product or a Graphical User
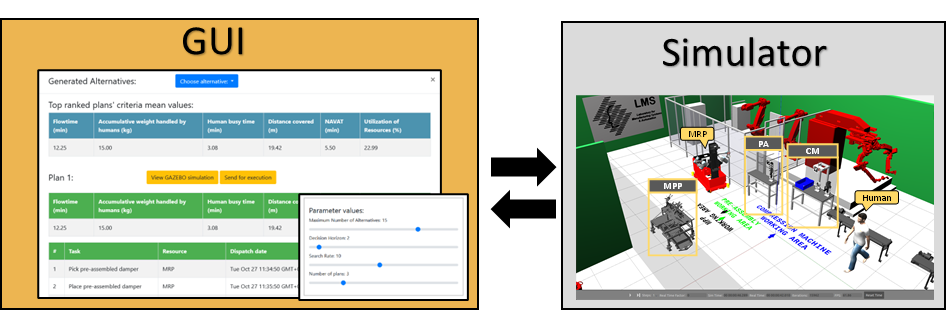
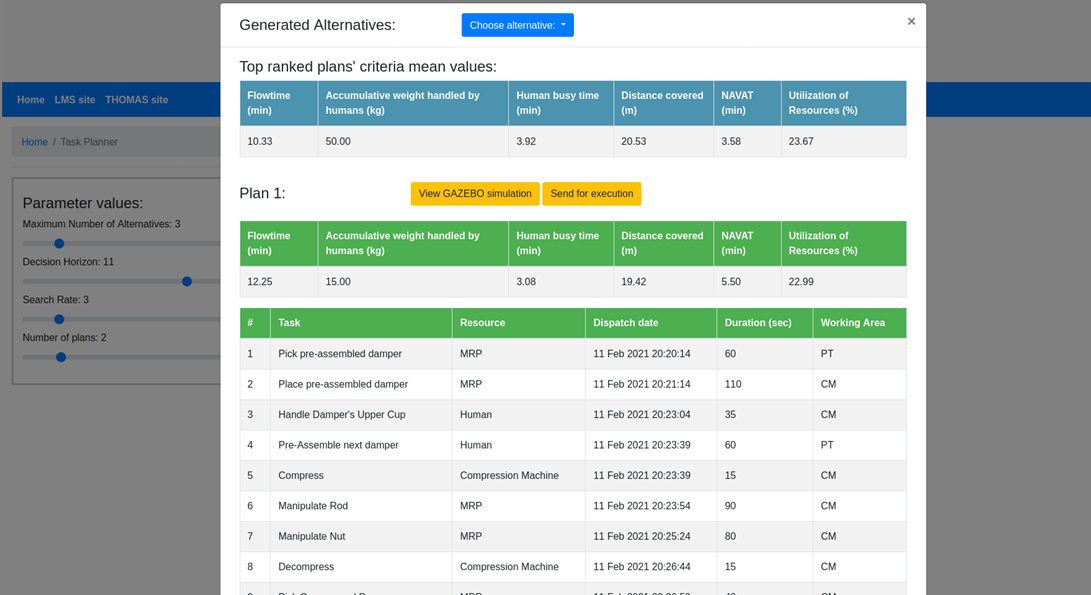
– Graphical User Interface (GUI), that provides a detailed view on workcell information, scheduling settings, search parameters and evaluation criteria.
Innovation
The existing modelling of human and robot tasks, as well as the taxonomy of the existing resources, in a consolidated model, is innovative. The evaluation of an HRC workplace layout, given multiple criteria, such as ergonomics, investment cost, robot reachability, minimum floor space etc. is quite similar to that of the designers’ experience. The incorporation of the resources’ suitability check, given the skills of humans and robots, for a specific task, is also a part of the decision to be made. Last, the integration of the decision-making software with 3D simulation models, in order for the use of spatial representation techniques to be overcome, enables the layout overview and a valid solution to be had in a short time.
Risks and limitations
Familiarized production designers and integrators with Ubuntu OS and ROS are recommended for the integration of task planning module.
There are several robotic manipulators and mobile platforms without ROS controller. Robots without ROS controller are not supported by the task planner module. ROS controllers are required to execute robot manipulators’ motion actions and mobile platforms’ navigation actions.
The simulated execution of a task plan in GAZEBO simulator might be a time-consuming process raising the total time duration of the task planning process for the end users.
The selected simulation tool (GAZEBO) requires enough computing power for the simulated execution of a use case including big number of resources (robots, mobile platforms etc.). In this case, another simulation tool might be used.
Creation/modifications of GAZEBO simulation environment might be easier for production designers familiarized with ROS and GAZEBO simulation environment.
Technology readiness level
6 - Safety approved sensors and systems are commercially available
Sectors of application
Automotive industry , Consumer goods industry , White goods, Elevators Industry, Industrial Modules Production.
Potential sectors of application
Production lines of materials, pharmaceuticals, machines, equipment and mining and many others where humans and robots work together in the production line
Patents / Licenses / Copyrights
License pricing should be customized as per each individual end user's requirements. The agreement will be made upon contact with the module owner.
Hardware / Software
Hardware:
High performance computer
Software:
ROS
Siemens - Process Simulate
Trainings
Trainings will be available soon on the training platform.
Photos
Trainings
To learn more about the solution, click on the link below to access the training on the Moodle platform
Dynamic task planning & work re-organization