
Data stream processing in Human-Robot-Collaboration
Name of demonstration
Data stream processing in Human-Robot-Collaboration
Main objective
The main objective of the AURORA use case is to demonstrate the feasibility and potential of data stream processing in HRC-supported finishing processes for car body models.
Short description
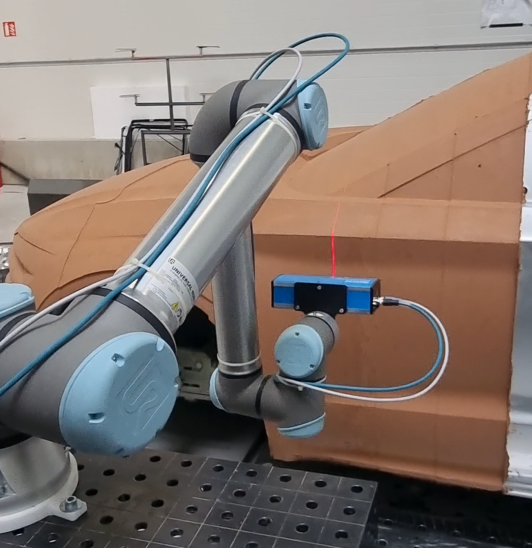
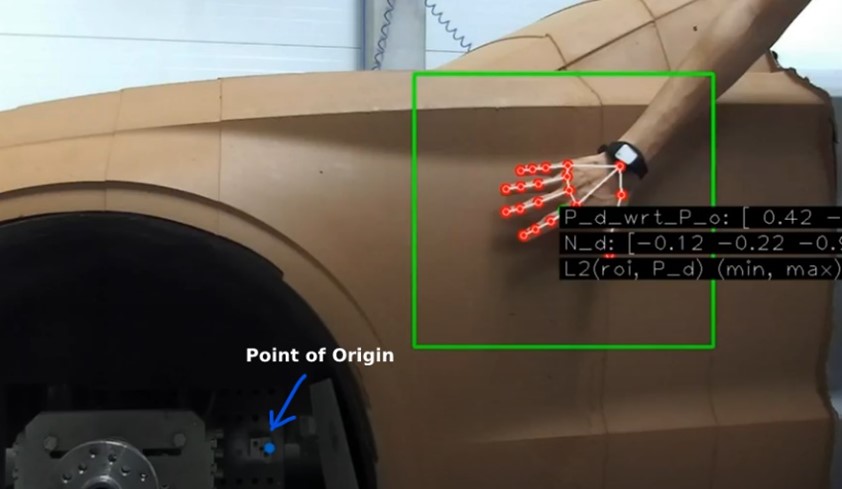
The project uses the application of Human Robot Collaboration (HRC) to allow an operator to utilize pre-defined hand gestures to command and direct a robotic scanner to specific regions of interest. The 3D scanner mounted on Robot produces the 3-D point cloud data for digital cloud comparison and projection of heat map onto the car clay surface. For gesture recognition, a smart IMU wearable device is used to capture the movements of human arm based on machine learning gesture recognition algorithm.
Owner of the demonstrator
Dr. Pierre T. Kirisci
Responsible person
Dr. Pierre Taner Kirisci (Project Coordinator), pierre.kirisci@pumacy.de
NACE
C - Manufacturing
Keywords
Robotics, Vision System, Machine Learning, Motion Planning, IoT - Cybersecurity - Artificial Intelligence - Predictive Maintenance – Revamping, human-robot collaboration, wearables, artificial intelligence, Collaborative Robotics, Finishing, automation, Smart Manufacturing.
Benefits for the users
The solution provides substantial benefits for the users in respect to increasing the process efficiency (e.g., reducing cycle times and post-work), the quality of products, and ergonomics of human workers.
Innovation
The innovation is evident when considering that collaborative robots in combination with AI based data analytics are yet rarely applied for supporting and optimizing finishing processes. It should also be noted that the solution provides a good basis for a whole spectrum of other applications (training & qualification, product/work quality assessment, process mining, teaching-in).
Risks and limitations
Applying human gesture tracking might be an issue for some users. Limitations are related to the fact that collaborative robots might be too slow for some processes, or too limited regarding the possible payloads. Also, the parameters of the industrial environment (such as lighting conditions) could play a role regarding the quality of the camera images and projections on the car body model.
Technology readiness level
5
Sectors of application
The project mainly focused on the finishing processes within the automotive sector. This particularly included the clay laying process on car body models. However, the solution can also support other finishing activities such as polishing and carving. .
Potential sectors of application
Industrial Assembly Processes in general from various sectors such as Automotive, Consumer Goods, Construction, as Maritime.
Patents / Licenses / Copyrights
Hardware / Software
Hardware:
UR10 Robot
3D machine vision TriSpectorP1000
Zed2i Camera
METAMOTIONS IMU sensor
Projector
Software:
UR10 control software
Data Analytics Tool
Python: For Machine Learning and Object detection
CloudCompare: For 3D point cloud comparison
Photos

Video
This video represents the implementation of Trinity project: AURORA. AURORA is a data stream processing experiment that supports process control and optimization of Human-Robot-Collaboration (HRC) workplaces through data stream processing and machine learning. The experiment is conducted on behalf of a finishing process for car exterior clay models.
https://youtu.be/dtqrNb7gK68 https://youtu.be/dRstX4WitQgNo modules assigned
Trainings
To learn more about the solution, click on the link below to access the training on the Moodle platform
Datastream processing in Human-Robot-Collaboration