
SME Demonstrators
Demonstration program 2 (2021-2022)



ATLANTES
The main objective is to increase the agility level of Composite Industries production line, by automating its quality inspection process of carbon fibre components by employing a machine vision system.



Learn more
AURORA
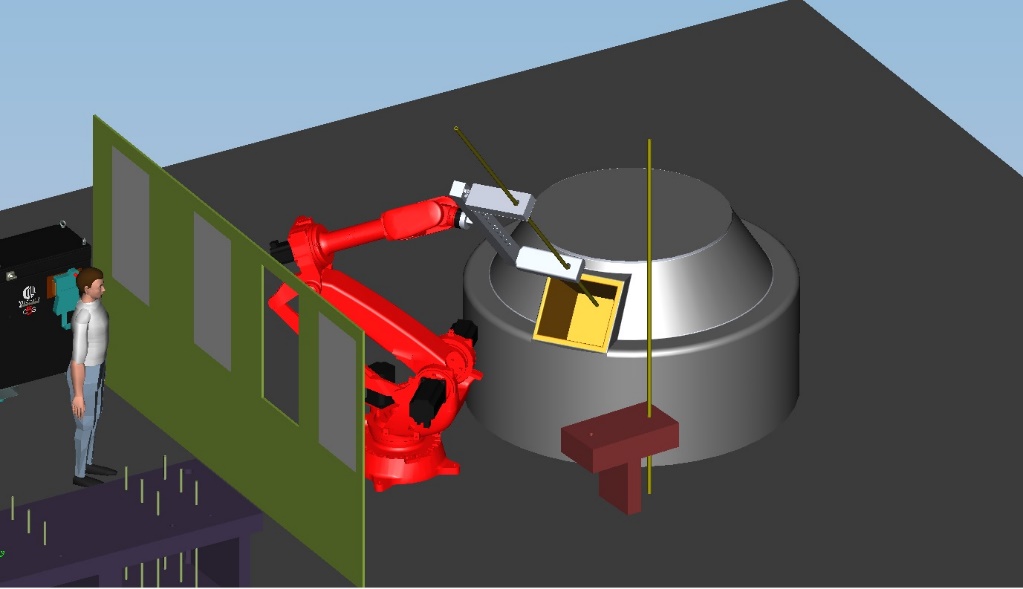
AURORA is a data stream processing experiment that supports process control and optimization of Human-Robot-Collaboration (HRC) workplaces through data stream processing and machine learning. The experiment is conducted on behalf of a finishing process for car exterior clay models.



Learn more



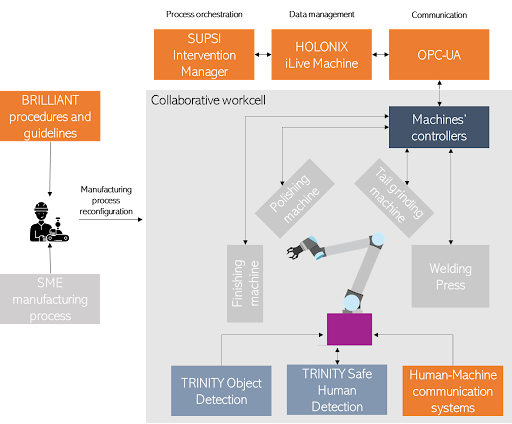
BRILLIANT
BRILLIANT's objective include the creation of a testbed, a working cell, which selects the right technologies for the Ideal-tek work cell and optimises the process parameters for an automous uptake of collaborative solutions; and the promotin of an artisanal manufacturing 4.0, combining human flexibility with the repeatability of cobots.

Learn more



CANNIER
The main objective of CANNIER is to develop a flexible robotic cell for the automatic lamination of carbon fibre reinforcements that have been pre-impregnated (prepreg) with activated resin, making the process more agile and sustainable. To achieve these results, tailored robotic end-effectors and a CAM software for the computing of the lamination trajectories will be developed.

Learn more

CORS
The goal of the project is to create an alternative agile manufacturing technology that will increase production and will be based on a collaborative robotic solution, applying the machine vision, force detector, and custom software into the micro-machining workstation.


Learn more



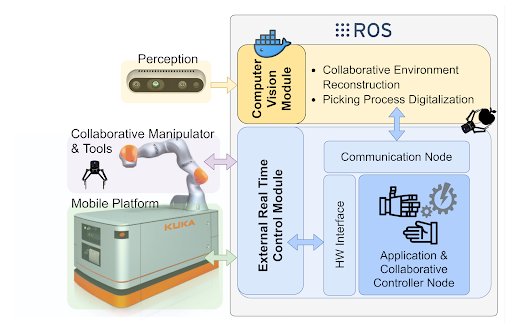
DynCOMM
The mobile manipulator developed across this project will fill the gap between human and robots in industrial environments. The solution proposed integrates mobile manipulators into hazardous manufacturing lines, as the novel platform bring them with higher rates of flexibility to detect the environment and navigate through them.
Learn more


Intelli5.0
The project aims to install a cobot with multiple sensors, which will be able to provide subjective evaluations similar to those of a human panel, reproduce human movement and touch feeling as well as measure physical parameters (force, vibration, dimensions, etc).

Learn more



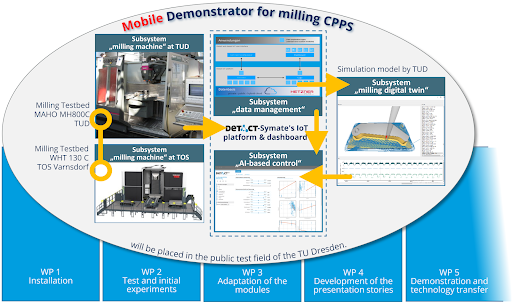
MCPPS
The aim of the demonstration is to develop a mobile demonstrator for a CPPS in the field of manufacturing, in particular milling. The demonstrator will show the smooth interaction of data acquisition from machine and process, data management and simulation models. The analysis of the process and the resulting quality of the machined part will be based on real process data, not only on simulated data.
Learn more

PROTON Robots
The goal of the proposed experiment is to demonstrate the feasibility of an automated switching mechanism between indoor and outdoor positioning technology that yields transparency for the user in the use of positioning sensors. We have already selected the sensor set and we are working on the module.
Learn more


RAISE24
RAISE is an interoperable information model, based on the OPC UA standard, that provides technical (e.g. predictive maintenance) and non-technical (e.g. fintech, insurtech, regulatory technology) services to the end-users through interconnected equipment, such as detecting anomalies or insuring productions.
Learn more


RECOPRODAS
The RECOPRODAS demonstrator's main achievement is the development and feasibility demonstration of a production assistant in the form of a mobile cobot unit dedicated to a cell. The cobotic production assistant (CPA) can be docked to any machine within the cell through an innovative docking mechanism ensuring mechanical alignment, electrical, and pneumatic power to the CPA and I/O signal exchange between machine and CPA. Inside the cell, the human operator decides which task the cobot should execute for the production batch at hand.

Learn more


RoboCut
RoboCUT is an innovative robotic solution which automatically optimizes and maps the layout of packaging liners on standard cardboard sheets, cuts the layouts and prints the package codes ensuring a flexible and rapid product life cycle.

Learn more


Robs4Steel
The purpose of the Robs4Steel demonstrator is to robotize the visual inspection in the refractory of the furnace after every tapping of liquid steel. This will allow operators to guide the robot around the furnace refractories remotely and assess them through the help of a heat resistant optical camera.


Learn more



SHAFTS
With SHAFTS, we demonstrate to shaft and axle manufacturers that bin picking cells are today reliable and that the installation time is limited (< one week). We do this by organizing local events for interested customers where we demonstrate 24/7 running bin-picking cells.


Learn more


SHARKY
With the use of the "Dummy Tools" method, collaborative robots will perform the heaviest welding activities, thus preventing welding workers from exposing themselves to unnecessary risks, increasing aluminium capacity production and quality, as well as reducing delivery time.
Learn more



SHIPWELD
SHIPWELD project has developed a robot programming system utilising a HTC Vive tracker as a user interaction wand. Preliminary welding tests with good results have been sompleted so far.

Learn more


SPINEYE
" The SpinEye project incorporates a human-robotic collaboration, premised on AI vision-system, which detects screw positions, provides Cloud inrastructure for training, monitoring and enhancement of the detection model. "

Learn more



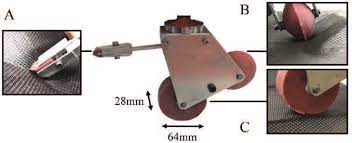
VISDEBURR
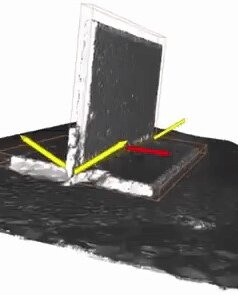
VisDeburr demonstration will illustrate the power of visual-guided deburring: measuring the location and size of the welding seams improves remarkably the quality of grinding and makes it much more flexible.


Learn more

Demo name
Quality control of carbon parts based on machine vision
Location
Technology area:
Robot Programming

Demo name
Datastream processing in Human-Robot-Collaboration
Location
Technology area:
Human-Robot Collaboration

Demo name
Collaborative solutions for flexible artisanal manufacturing
Location
Technology area:
Human-Robot Collaboration
Demo name
Robotic lamination of composite parts
Location
Technology area:
Robot Cell Development
Demo name
Collaborative robotic solution for laser micromachining
Location
Technology area:
Robot Cell Development
Demo name
Dynamic collaborative control of mobile manipulators for complex picking
Location
Technology area:
Human-Robot Collaboration
Demo name
Toward Industry 5.0: Collaborative Intelligence for supporting enhanced human-cobot interaction in agile production, demonstrated through the creation of innovative in-process quality inspection services
Location
Technology area:
Simulation

Demo name
Precise positioning in alternating environments for autonomous railway inspection and parking lot striping robots
Location
Technology area:
IoT
Demo name
Robots as an intelligent services ecosystem
Location
Technology area:
Digital Twin

Demo name
Reconfigurable Cobotic Production Assistant
Location
Technology area:
Reconfigurability

Demo name
Custom industrial packaging production robot
Location
Technology area:
Human-Robot Collaboration

Demo name
Robotized inspection system for high-temperature electric arc furnaces (EAF).
Location
Technology area:
Robot Programming
Demo name
Local demonstrations of predictable bin picking
Location
Technology area:
Robot Cell Development

Demo name
Worker-centric programming tools for free designing of lightweight aluminium-based products
Location
Technology area:
Robot Programming

Demo name
Mobile, flexible robotic welding system to reshape the European shipbuilding industry
Location
Technology area:
Simulation
Demo name
AI & Cloud enabled vision system for agile teach-in of assembly processes
Location
Technology area:
Human-Robot Collaboration

