
Virtualization of a robot cell with a real controller
Main functionalities
Enables the control of simulated manufacturing hardware using a real controller. The simulated hardware is represented in a real-time 3D-environment which can be used for demonstrating actual system functionality, training employees, virtual commissioning and testing production operations for new parts. These activities can be done before the system even exists or after commissioning when they can be done without disturbing the ongoing production. Since the control software used is identical to the real-world control software all master data created with the virtual system can be transferred to the real one.
Technical specifications
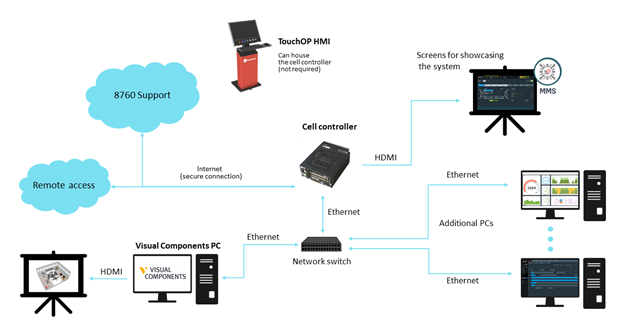
The main hardware consists of two PCs that are connected with an Ethernet-cable and communicate with each other through the WebSocket-protocol.
Hardware:
The Fastems cell controller is an industrial PC that is used to host the MMS (Manufacturing Management Software). It is identical to the one used to control real manufacturing hardware. The cell controller can also be housed inside a TouchOP -device which provides the user with a screen, keyboard and mouse that can be used to interact with the MMS user interface. Otherwise, a separate set of these peripherals is required. The cell controller includes a Fastems specific connectivity solution which allows the Fastems 8760 Support and user to connect to the system remotely.
The sole purpose of the Visual Components PC is to run the virtual model and after the model is configured and running it doesn’t require any additional user inputs. Therefore, only a screen is required for this PC. A virtual reality headset can be attached to allow the user to walk around the virtual system . There are no specific system requirements for the PC, but it must meet the minimum requirements for running Visual Components 4.2.
Additionally, multiple PCs and screens can be connected to the system to view and interact with the MMS user interface. These PCs can be used to add and edit master data, view and create production orders, import NC-programs, view the key performance indicators (KPIs) etc. locally or remotely. The screens allow the user to display the virtual model or e.g. system KPIs to a larger audience.
Software:
Both PCs are run on the Windows 10 operating system. The version of the control software is MMS 7.2 and the Visual Components version is 4.2.
Inputs and outputs
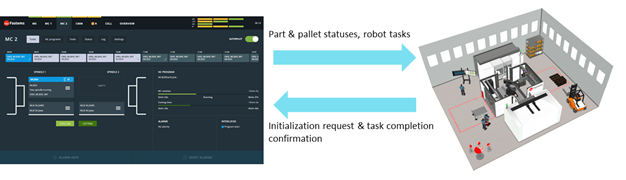
All data between the control software and the virtual cell is transferred using the WebSocket-protocol. The data consist of six different types of messages which are sent in the JSON format. Five of these messages are sent from the MMS to the model and one is sent from the model to the MMS. These messages contain the necessary information (coordinates, IDs, grippers etc.) to fulfill the requested task. The model will listen for incoming messages until it is stopped or paused.
Formats and standards
WebSocket, JSON, Python 2.7
Owner (organization)
Fastems Oy Ab, www.fastems.com
Trainings
Available later from TRINITY DAP