
ODIN VR based Safety Training
Main functionalities
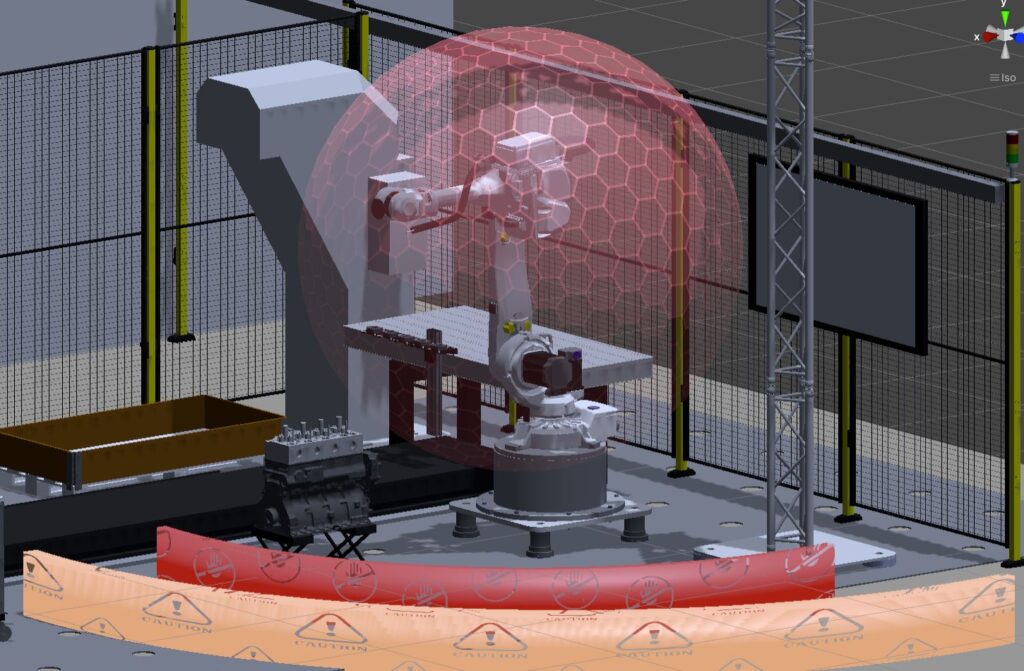
Incorporating immersive technologies for training user regarding safety of Human-Robot Collaboration cell. This includes all requirements for user to get familiar with the safety based on robots’ status and hazardous areas. User will be trained regarding hazardous areas based on risk assessment and safety distances, robots’ working space, and assembly sequence by monitoring status of robotic cell. The system consists of 3D elements for visualizations and increase feel of presence by utilizing avatar. Development of such system leads to create templates for utilizing them in Unity environments for creating modular and scalable application. Therefore, utilizing our custom unity’s package can decrease time of development and provide companies with testing suitability of such system in training.
Technical specifications
The system consists of HTC VR HMD, two Vive controllers and Base stations. For implementing such application you require a PC with VR ready specifications and Unity version 2020.3.3f1 or 2021.3.15f1. Based on dimension of your layout, you require enough space to navigate around or use teleport option in application.
Inputs and outputs
The animations are required as input to the development environment for utilization in robot trajectory and effect of robot movement based on violation of hazardous areas. For instance, this can be achieved by utilizing Visual Component simulations and export it as Blender file and integrate it as the animation in Unity. Other inputs are required in defining the content of UIs’ instruction such as text and images.
Formats and standards
Standards that were considered in the development of the concept and templates: ISO/TS 15066, ISO 10218-2, ISO 3864-2, ISO 3864-3, and IEC 60204-1,
Owner (organization)
Tampere University