
Safety logic for seamless HRC
Main functionalities
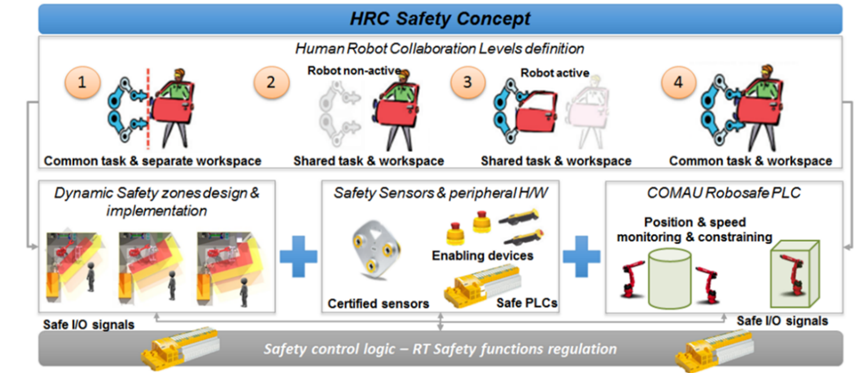
This module refers to the safety architecture that has been implemented and includes all the safety certified technologies used to ensure human safety inside the collaborative cell. The layout of the cell has been regulated in accordance with the implemented safety systems. Given the available space for the cell the involved components have been in a way ensuring that the human may not need to walk close to walls minimizing the risk for entrapment. Then, the hardware devices that will be used for implementing the safety system such as cameras, enabling devices, safety PLCs, emergency buttons etc. are selected. The overall safety control logic (Figure Below) that integrates the different components is responsible for regulating the activation of each safety method at each point of the execution depending on the current phase of the scenario.
Technical specifications
The hardware and software requirements for this demonstrator are described below. The main hardware consists of a Comau industrial robot, a monitoring system and a safety PLC provided by PILZ and an AR headset. On the software side, a specified software tool for safety zones design provided by PILZ is used.
Three different but complementary systems have been deployed for physically implementing the discussed safety concept:
C5G Robosafe:
The COMAU C5G Robosafe system, is based on B&R safety certified PLCs that monitor and regulate in real time robot’s position and speed.
PILZ SafetyEye – Safe camera system:
A certified safe camera system is used for real time monitoring of the collaborative workspace.
Safety Controller – PILZ PSS4000
Safety Controller is an external PLC.
Inputs and outputs
The Safety logic for seamless HRC module uses a set of input data from the system to provide the safety awareness to the operator. The required input data are listed below:
Human location in the working area
Dimensions of robot safe working volumes
Set of Outputs:
Robot behavior information for increasing safety awareness
During the robot’s operations, information related to the actions of the robot is visualized in the form of informative messages, e.g., a text message describing the current operation that the robot is performing.
Safe working volumes
Messages in the form of safe working volumes help the operator to watch out about potential dangers that exist in the shopfloor while working, such as the movement of the robot, the working status of a machine etc.
Formats and standards
ISO 10218-1 Robots and robotic devices – Safety requirements for industrial robots – Part 1: Robots
ISO 10218-2 Robots and robotic devices – Safety requirements for industrial robots – Part 2: Robot systems and integration
ISO / TS 15066:2016: Robots and robotic devices – Collaborative robots
ISO 13855:2010 Safety of machinery- Positioning of safeguards with respect to the approach speeds of parts of the human body
Owner (organization)
LMS – University of Patras
Trainings
To learn more about the solution, click on the link below to access the training on the Moodle platform
Safety Logic Seamless for HRC