
Remote Control Of Industrial Robots
Main functionalities
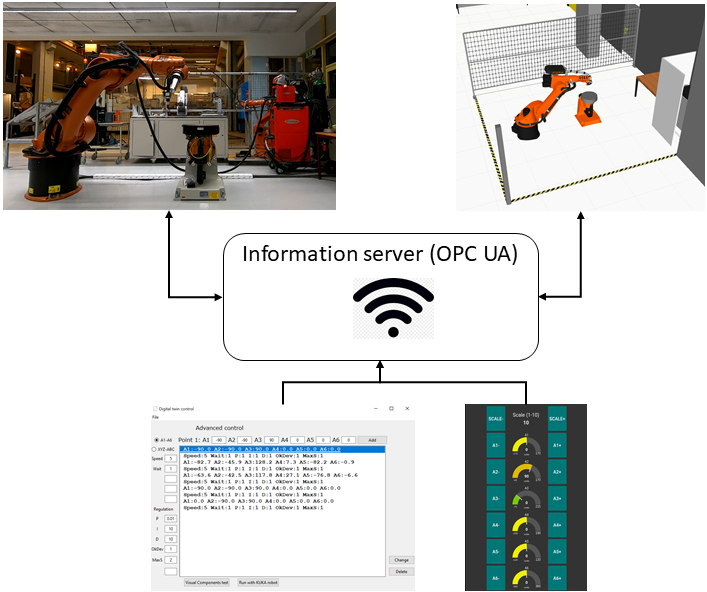
The module offers a method to control a general industrial robot remotely. This module offers a robot controlling method through IoT by using an information server. The interface takes input from the robot operator and the operator is able to program or move robots remotely.
Proposed setup
Technical specifications
The module is used to showcase how an interface can be connected to robots and enable remote control. Two interfaces are created, the first one is running in python which has advance control function, the second one is running in Node-red which allows robot operator to control it on mobile device.
The interface connects to the server and is able to read and write data in the server.
Inputs and outputs
Inputs: The module gets input from the robot operator on where the robot will move and with what speed.
Outputs: The robot will execute the movements remotely as operator inputted.
Formats and standards
Formats: OPC UA standard, KUKA RSI, KUKAVARPROXY-OpenShowVar
Owner (organization)
The Owner of the demonstrator is: The Artic University of Norway (UiT) https://en.uit.no/startsida
The Arctic University of Norway is a medium-sized research university that contributes to knowledge-based development at the regional, national and international level. UiT is the third largest university in Norway and northernmost university in the world. UiTs study portfolio covers all classical subject areas from Health Sciences, Social Sciences, Education and Humanities, Science and Technology to Economics, Law, Social Work, Tourism, Sports and Fine Arts. While the key research areas covers the polar environment, climate research, indigenous people, peace and conflict transformation, telemedicine, medical biology, space physics, fishery science, marine bioprospecting, linguistics and computational chemistry.
Trainings
Training material is under production. The tutorial shows two examples/methods on how robot can be controlled wirelessly. http://heinlein.mech.upatras.gr/trinity/remote-control-for-industrial-robot/