
ODIN Autonomous mobile manipulator for collaborative operations
Main functionalities
 Novel mobile robotics platform that permits an easy and flexible management of production tasks.
Novel mobile robotics platform that permits an easy and flexible management of production tasks.
The adoption of such integrated platform will allow an augmented flexibility in the production line as well as a high rate of reconfigurability of the platform in a complete collaborative and open environment
Technical specifications
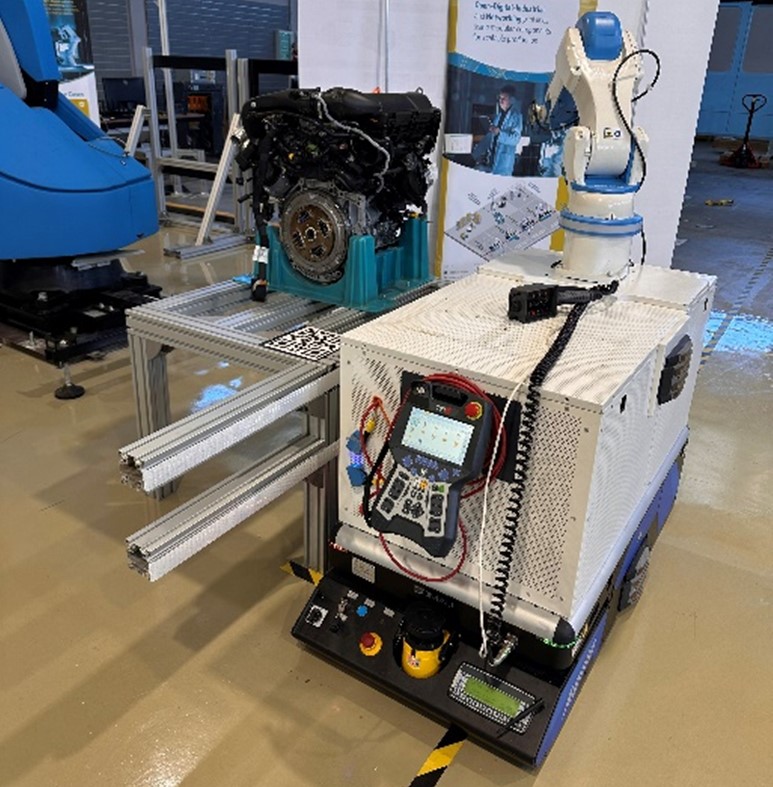
The platform is based on the integration of two COMAU stand-alone robotic resources: the Agile 1500 AGV and the Racer5 Cobot.
The platform is equipped with two independent batteries for the electricity supply of the AGV and the robotic arm separately. The battery, controller, inverter and internal cables of the robotic arm is placed inside the enclosure mounted on top of the AGV. This structure could be also equipped with different tools and racks that the robotic arm may need during operation, like grippers, sensors or additional components.
The stability of the platform during an emergency stop of the robotic arm is guaranteed by accurate studies and simulations of the dynamic behaviour of the platform, to ensure the highest levels of safety for the people and the surroundings.
The mobile platform can perform its task even when the part to inspect is placed on a conveyor and it is equipped with a camera sensor that allows the visual assessment based on object perception. The mobile platform can autonomously interact with operators safely and thus provide an effective solution towards flexible collaborative operations which are needed in different workstations under existing production lines.
Owner (organization)
ODIN Project Coordinator
Dr. Sotiris Makris
Laboratory for Manufacturing Systems and Automation (LMS),
University of Patras
Tel: +30-2610-910160
Fax: + +30-2610-997314
e-Mail: makris@lms.mech.upatras.gr