User-friendly human-robot collaborative tasks programming
Name of demonstration
User-friendly human-robot collaborative tasks programming
Short description
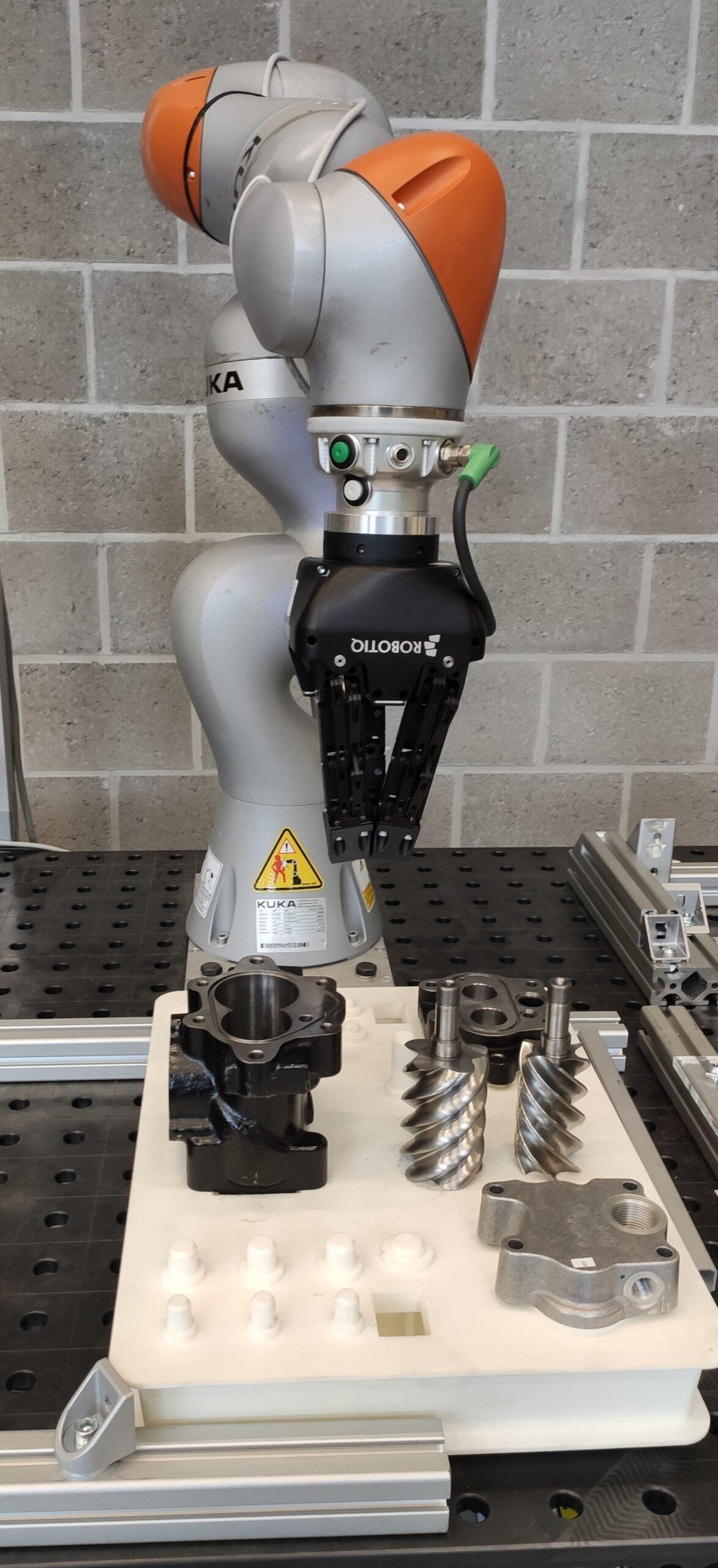
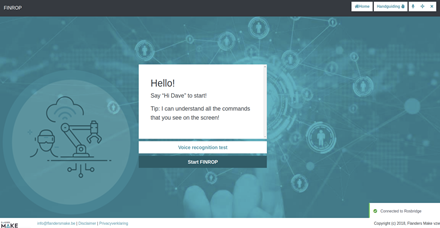
This demonstrator introduces a new method of programming robotic applications which is intuitive, user-friendly and requires no prior robot programming expertise. Intuitive features of programming such as by using HMI, speech, and teaching by demonstration will allow the creation/modification of robotic applications in a cost and time-effective manner. This use case will target SMEs and large-scale industries requiring flexible assembly solutions.
Owner of the demonstrator
Flanders Make
Responsible person
dr. ir. Raheel Afzal, trinity@flandersmake.be
NACE
C28 - Manufacture of machinery and equipment n.e.c.
Keywords
Collaborative robots, Human-robot interaction, ROS, Middleware, Intuitive Programming.
Potential users
The potential users can be any company small or large that has the need to deploy robots. It is especially useful for companies that produce in small volumes and batch sizes.
Benefits for the users
Large reduction in programming time (vendor-independent) that leads to cost saving. The required operator training to create robot applications is reduced. The functionalities are presented as add-on module that gives intuitive programming ability to any robot.
Innovation
The innovation is in the way of programming. Rather than long lines of code, this method allows programming by demonstration and use of robot skills. Thus, these skills can be concatenated in the required order by unskilled users. These skills can also be reused as required in a future iteration or change.
Risks and limitations
The demonstrator is based on ROS. A thorough functional safety analysis is required before deployment.
Technology readiness level
5
Sectors of application
Manufacturing.
Potential sectors of application
The potential is there for any sector that has a need for robotics. Therefore, medical sector, service sector and food sector can also deploy this technology with necessary constraints.
Hardware / Software
Hardware:
Robot arm
Control PC
Software:
Robot driver
ROS/ROS2
Docker