
Optimal locations and postures of reconfigurable fixtures
Main functionalities
The module can be used to mount multiple workpieces onto a fixturing system constructed from two or more Stewart platforms (hexapods) with passive degrees of freedom. The fixturing system does not contain any actuators, but each hexapod can be reconfigured into any desired posture by a robot arm. This module provides software to automatically compute – given the geometry of workpieces to be mounted onto the fixturing system – the suitable postures of hexapods for each workpiece.
The module is used as follows: First the geometry of all workpieces is provided and the software computes the locations and postures of hexapods so that all workpieces can be mounted. The bases of hexapods are then manually installed in the production cell. Next the robot moves the top plates of the hexapods so that the selected workpiece can be mounted and then places this workpiece onto the resulting fixturing system. The desired production process can start now. Once there is a request to change the production from one workpiece to another, the robot(s) can automatically move the hexapods to the pre-computed postures for this new workpiece, the new workpiece can be placed onto the fixturing system and its production can start.
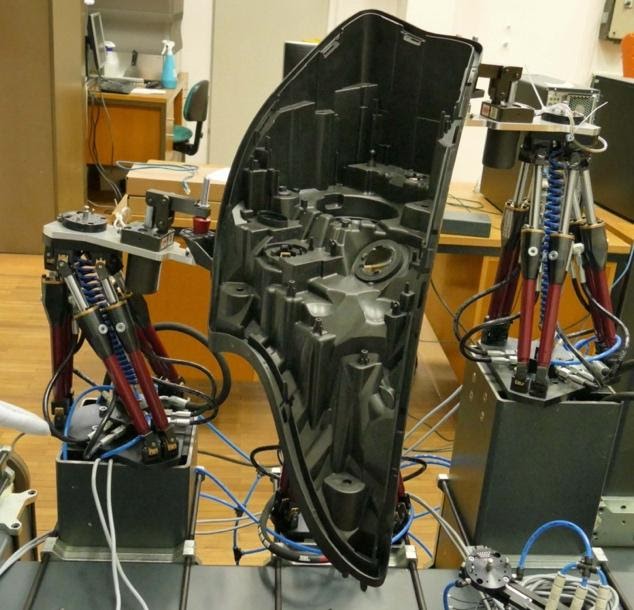
Automotive light housing mounted onto the fixturing system composed of three hexapods

The robot can reconfigure the hexapods by latching onto the top plates of the hexapods
Technical specifications
The module requires the following hardware and software:
– One or more robot arms, e.g. Universal robot UR-10.
– Two or more hexapods with passive degrees of freedom and pneumatic brakes. The price of each hexapod is ca. 8000 EUR, but for a limited number of hexapods, a loan agreement can be made for participants of TRINITY open calls without any costs besides transportation.
-Tool exchange system, e.g. Destaco QC-30, to be mounted onto the hexapods and the tip of the robot.
-Pneumatic air.
-Software program provided together with the hexapods to compute the locations and postures of hexapods comprising the fixturing system for a given set of workpieces.
The following robot movements and operations need to be programmed:
-Robot motion to latch onto the hexapod and disengage the hexapod’s brakes.
-Robot motion to move the hexapod from one posture to another.
-Robot motion to move away from the hexapods after engaging its brakes.
Inputs and outputs
Phase 1 – computing the hexapod postures by taking into account the geometry of workpieces to be mounted onto the fixturing system:
Inputs:
-CAD models of all workpieces in STEP format. For each workpiece, the locations where the workpiece should be attached to the hexapods comprising the fixturing system must be specified in workpiece coordinate system.
-Kinematic models of hexapods in URDF format. The location on each hexapod where the workpieces should be mounted must be specified in hexapod coordinate system.
-Kinematic model of a robot arm involved in the production process in URDF format.
-Kinematic constraints regarding the robot and hexapod workspace that need to be considered by the optimization algorithm.
Outputs:
-The locations of hexapod bases in the robot coordinate system.
-The locations of hexapod top plates for each of the given workpieces specified in the hexapod coordinate system.
Phase 2: industrial production
Input:
Identity of the workpiece to be mounted.
Outputs:
-Hexapods top plates are moved to the new configuration of the fixturing system by a robot.
-The production process involving the new workpiece is started.
Formats and standards
Licenses:
The software for the computation of hexapod postures is not open source but is provided in a package together with hexapods.
Formats:
STEP format to provide CAD models of workpieces.
URDF format to provide kinematic models.
Owner (organization)
Jožef Stefan Institute, Department of Automatics, Biocybernetics and Robotics
Trainings
We provide information about the example implementation of the industrial production task “Assembly of automotive light housings” that was implemented in collaboration with a manufacturing SME. It involves mounting of different automotive light housings onto the fixturing system composed of hexapods and the reconfiguration of hexapods:
Description of the task http://www.reconcell.eu/content/space/experiments.html#elvez
Assembly of light housing 1 http://www.reconcell.eu/content/space/videos/elvez_assembly_x07.mp4
Assembly of light housing 2 http://www.reconcell.eu/content/space/videos/elvez_assembly_x82.mp4
Reconfiguration of hexapods http://www.reconcell.eu/content/space/videos/X07_to_x82_fast.mp4
To learn more about the solution, click on the link below to access the training on the Moodle platform
Optimal locations and postures of reconfigurable fixtures